STM32--4路PWM
字数统计:253 阅读时长 ≈ 1分钟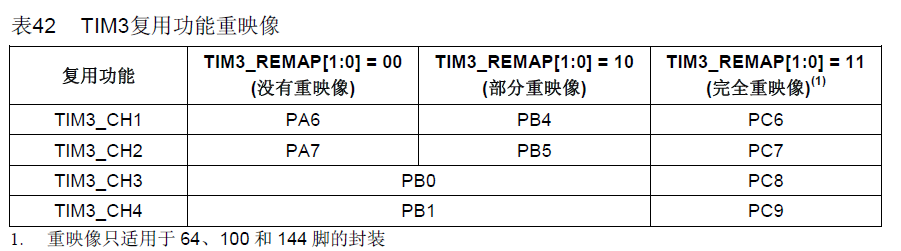
TIM3输出4路PWM
void TIM3_INIT_PWM(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA| RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//TIM3 CH1的PWM脉冲波形 GPIOA.6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//TIM3 CH2的PWM脉冲波形 GPIOA.7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//TIM3 CH3的PWM脉冲波形 GPIOB.0
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //TIM_CH3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//TIM3 CH4的PWM脉冲波形 GPIOB.1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
//初始化CH1
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
//初始化CH2
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
//初始化CH3
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
//初始化CH4
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM3,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);//CH3预装载使能
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);//CH3预装载使能
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIM1在ARR上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
TIM4输出4路PWM
void TIM4_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); //
//CH1--PB6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM4_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//CH2--PB7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//CH3--PB8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//CH4--PB9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //
TIM_TimeBaseStructure.TIM_Prescaler =psc; //
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //
TIM_OCInitStructure.TIM_Pulse = 0; //
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //
TIM_OCInitStructure.TIM_Pulse = 0; //
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //
TIM_OCInitStructure.TIM_Pulse = 0; //
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //
TIM_OCInitStructure.TIM_Pulse = 0; //
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //
TIM_CtrlPWMOutputs(TIM4,ENABLE); //
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //
TIM_ARRPreloadConfig(TIM4, ENABLE); //
TIM_Cmd(TIM4, ENABLE); //
}
本文由simyng创作,
采用知识共享署名4.0 国际许可协议进行许可,转载前请务必署名
文章最后更新时间为:January 1st , 2021 at 12:36 am